|
||||
|
|
Амфибийные машины Соединенных Штатов Америки Окончание. Начало в "ТиВ" №№ 10/2000 и 1,3,7/2001 г.   Амфибия "Флаинг дак" при движении на воде в водоизмещающем режиме и на подводных крыльях Большие подготовительные и научно-исследовательские работы по созданию амфибий на подводных крыльях в США начались, видимо, в начале 60-х годов. Для проверки полученных данных и демонстрации возможностей машин на подводных крыльях фирма Лайкоминг дивижн корпорации AVCO изготовила опытный образец амфибии на базе плавающего автомобиля GMC- 353, на котором был установлен газотурбинный двигатель «Лайкоминг» Т-53 мощностью 589 кВт, крыльевая система и другие устройства. Этот образец, названный «Флаинг дак», прошел испытания в июне-августе 1959 г. во Флориде. Полная масса автомобиля – 13,4 т, грузоподъемность – 2,8 т, максимальная скорость движения по суше – 80,5 км/ч, по воде на крыльях – 56 км/ч. Движение по воде «Флаинг дак» начинает как обычная водоизмещающая амфибия. На скорости около 8 км/ч начинается ощутимый выход корпуса из воды. Полностью корпус выходит из воды на скорости, близкой к 24 км/ч, и дальнейшее движение происходит на подводных крыльях. При этом сопротивление воды уменьшается на 60% по сравнению с сопротивлением погруженного в воду корпуса. На максимальной скорости днище корпуса находится на расстоянии от уровня спокойной воды около 1,2 м, а все три крыла (два носовых с размахом 2,74 м каждое и одно кормовое с размахом 3,65 м) погружены в воду на глубину 0,3-0,76 м. Распределение массы автомобиля между крыльями выполнено в соотношении – две трети на передние крылья, одна треть на заднее. В пустотелой стойке заднего крыла проходит привод на гребной винт диаметром 863 мм и максимальной частотой вращения 1800 об/мин. В крыльевом режиме автомобиль имел число Фруда по водоизмещению 3,21 при удельной мощности 43,9 кВт/т, что характеризовало его как заманчивый вариант.  LVHX-1 на суше  LVHX-1 движется по воде на подводных крыльях  Амфибия на подводных крыльях LVHX-1 Практически без всяких пауз после окончания испытаний автомобиля «Флаинг дак», изучения и анализа их результатов AVCO приступила к разработке и постройке новой модели колесной 4x4 амфибии на подводных крыльях LVHX-1. Но его разработке предшествовала большая программа модельных испытаний, в процессе которых оценивалось уменьшение сопротивления воды из-за уборки всех колес в специальные ниши корпуса, эффективность различных крыльевых систем и другие вопросы. Подводные крылья как очень важный элемент скоростных амфибий должны обеспечивать постоянство подъемной силы крыльев в широком диапазоне скоростей движения, устойчивое движение в крыльевом режиме и быстрый выход на этот режим. Существует несколько рабочих схем подводных крыльев, но для амфибийных машин более предпочтительны по ряду причин две крыльевые системы: V-образные, пересекающие поверхность воды, и глубокопогруженные автоматически управляемые. Опытный образец LVHX-1 был построен в 1964 г. Его полная масса составляла 13,6 т, а грузоподъемность – 5,0 т. Длина амфибии была равна 11260 мм, ширина – 3300 мм, высота – 3785 мм. На амфибии установлены носовое и кормовое полностью погруженные крылья с размахом 5330 мм: носовое на двух стойках и кормовое на одной стойке. В стойке кормового крыла проходит привод к гребному винту, а в стойках носового крыла элементы гидравлической системы привода управления положением закрылков крыла. Крыльевые системы имеют устройства для подъема их из воды поворотом вокруг поперечных осей, после чего носовое крыло укладывается в П-образную нишу сзади кабины управления, а кормовое – в специальную нишу на корме. При этом размах крыльев уменьшается до ширины амфибии. На амфибии в ее передней части был установлен газотурбинный двигатель «Лайкоминг» TF-1460 с максимальной мощностью 902 кВт, от которого в рабочем режиме снимается мощность порядка 662 кВт. Два воздухозаборника газотурбинного двигателя расположены за кабиной по бортам корпуса. От двигателя мощность карданной передачей подводится к раздаточной коробке, от которой также карданными передачами направляется ко всем колесам с шинами размером 18.00-25, к гребному винту диаметром 736 мм, обеспечивающему движение на подводных крыльях, и к другому гребному винту диаметром 572 мм, работающему при движении амфибии в водоизмещающем режиме. Этот гребной винт может поворачиваться 8 горизонтальной плоскости на 90° для управления машиной в водоизмеидающем режиме. Радиус циркуляции при движении в водоизмещающем режиме равен 11м, в крыльевом режиме – 55 м. Открытая грузовая платформа размером 4,15x3,1 м находится в средней части корпуса амфибии для размещения восьми стандартных контейнеров. Такое расположение платформы сводит к минимуму влияние на устойчивость положения и движения несимметричного расположения грузов. Погрузочно-разгрузочные операции на суше облегчаются за счет посадки амфибии днищем на грунт при втягивании колес в ниши корпуса, на что затрачивается 12 с. При этом погрузочная высота платформы составляет около 800-850 мм, а откидные борта грузового отделения использутся в качестве сходней.   Амфибия LVHX-2  Схема крыльевой системы амфибии LVHX-2 В водоизмещающем режиме при поднятых крыльях и убранных в ниши колесах скорость амфибии достигает 22 км/ч, что соответствует числу Фруда по водоизмещению 1,26 при удельной мощности машины 66,29 кВт/т. Высокое значение скорости в водоизмещающем режиме в значительной мере обусловлено уборкой колес в ниши корпуса, рациональной формой подводной части корпуса и конструкцией гребного винта, реализующего большую мощность двигателя. При движении на крыльях днище корпуса амфибии располагается от поверхности воды на расстоянии в среднем 900-1000 мм, а сами крылья погружены в воду примерно на такую же величину. Стабилизация амфибии при движении на волнении обеспечивается управляемыми закрылками носового крыла, которые приводятся в действие автопилотом фирмы Лайкоминг с помощью гидравлической системы. Датчиком системы является ультразвуковое устройство, регистрирующее высоту и период волны и передающее эти данные на исполнительный привод закрылков переднего крыла. Последний автоматически устанавливает крыло в положение, учитывающее влияние волнения поверхности воды на глубину погружения крыльев, крен и дифферент амфибии. При движении по воде на крыльях с максимальной скоростью 65 км/ч число Фруда по водоизмещению составляет для этой амфибии 3,73 при удельной мощности 66,29 кВт/т. Другой плавающий 4x4 автомобиль на подводных крыльях LVHX-2 с грузоподъемностью 4,5 т и полной массой 15,8 т был разработан и построен американской фирмой Фуд мэшинэри (FMC) в 1963 г. Он был оборудован тремя крыльями: двумя передними V- образными крыльями, пересекающими свободную поверхность воды, и одним задним глубокопогруженным крылом с управляемыми закрылками. При движении по воде все колеса убираются в специальные экранированные ниши корпуса, при подходе к берегу колеса опускаются в рабочее положение, а подводные крылья убираются в ниши корпуса и не выступают за его обводы. В отличие от других амфибий заднее крыло с гребным винтом убирается в корпус не вращением относительно горизонтальной оси, а втягиванием в нишу корпуса, что позволяет использовать один гребной винт на всех режимах работы амфибии – при преодолении прибрежной зоны при входе в воду и выходе из нее в водоизмещающем режиме и при движении на крыльях. На автомобиле в его корме был установлен газотурбинный двигатель «Сатурн» фирмы Соляр мощностью 810 кВт, что позволяло развивать максимальную скорость движения по спокойной воде на крыльях примерно 60 км/ч, в водоизмещающем режиме – 22 км/ч и при выходе на берег – 14,4 км/ч. Максимальная скорость движения по суше – 65 км/ч. Числа Фруда по водоизмещению при этом составляли: в крыльевом режиме 3,35, в водоизмещающем – 1,23 и при выходе на берег – 0,80 при удельной мощности 51,2 кВт/т. Габаритные размеры амфибии : длина – 11300 мм, ширина-3100 мм, высота – 3700 мм. Колеса с шинами 18.00-25 устанавливаются на продольных гитарных балансирах, связанных с пневматическими упругими элементами и гидравлическими цилиндрами уборки и выпуска колес. Для ускорения и облегчения погрузочно-разгрузочных работ предусмотрена возможность подъема и опускания колес с полной нагрузкой в корпусе в пределах дорожного просвета. Следует отметить, что глиссирующие машины и амфибии на подводных крыльях разрабатывались по одним и тем же тактико-техническим требованиям корпуса морской пехоты ВМС США, что предопределило схожесть многих технических характеристик образцов, несмотря на различие компоновочных схем, мощностей двигателей и других конструктивных особенностей. Кроме глиссирующих и амфибий на подводных крыльях в США разрабатывалось и испытывалось несколько моделей на воздушной подушке, созданных фирмами Белл, Бертельсен и другими. Но следует отметить, что если в конце 50-х и начале 60-х годов в США над разработкой проблем создания судов на воздушной подушке активно работали многие ученые и изобретатели, то в дальнейшем прогресс в этой области техники замедлился из-за отсутствия интереса к ней со стороны правительства и промышленников. Зато в других странах, особенно в Англии, продолжались активные работы по созданию различных типов судов на воздушной подушке, которые привели к обнадеживающим результатам и созданию вполне работоспособных конструкций для военных целей и гражданского использования. Для амфибийных машин на воздушной подушке (АМВП) очень важным качеством является хорошая проходимость как при переходах от одной среды движения к другой (суша-вода- суша), так и при движении по суше. Вторым важным качеством является достаточность тяговых сил, которые можно получить либо используя аэродинамическую тягу, либо контактную тягу сухопутного движителя (колеса,- гусеницы) для преодоления сил сопротивления движению на желаемых скоростях, а также для преодоления профильных препятствий. В некоторых случаях АМВП выполняются несамоходными, а буксируемыми из-за трудностей получения необходимых тяговых сил на самой машине. Третьим качеством является хорошая управляемость на суше и на воде при эксплуатации на ограниченных по площади акваториях и участках местности. При этом следует иметь в виду,что осуществлять управление АМВП над сушей значительно труднее, чем над водой.  Схема АМВП «Карабао» фирмы Белл  Проект бронетранспортера со съемным ограждением для создания воздушной подушки фирмы Белл Фирма Белл спроектировала и изготовила небольшую АМВП под названием «Карабао». Эта машина была предназначена для работы в труднодоступных районах суши, с преобладанием песков, снежных покровов и водных участков местности. На водоизмещающем корпусе спереди установлена двухместная кабина, в середине – пятилопастный осевой вентилятор диаметром 1,3 м с горизонтальной плоскостью вращения и сзади – тянущий двухлопастный воздушный винт диаметром 1,8 м и изменяемым шагом. В нижней части корпуса смонтированы три равноудаленных от центра корпуса камеры воздушной подушки диаметром 2,4 м и два боковых колеса с дифференциальным торможением. Общая масса машины – 1315 кг. Вентилятор вращается двигателем мощностью 66,2 кВт и питает воздухом все три камеры. Воздушный винт приводился в действие двигателем мощностью 110,4 кВт. В потоке воздуха за винтом установлены двойные рули достаточно большой площади.Машина управляется одним водителем. Три воздушные камеры обеспечивают необходимую устойчивость движения на подушке, двойные рули – маневренность и управляемость при парении над водой, а боковые колеса с дифференциальным торможением – маневренность и управляемость на суше. Габаритные размеры машины 5,7x4,9x3,05 м. Максимальная скорость движения при нормальной нагрузке составляет 96 км/ ч при запасе хода 190 км. При малой скорости движения машина может преодолевать вертикальные препятствия высотой до 46 см, а при большой – до 30 см. Грузоподъемность машины может быть увеличена до 450 кг, но с ухудшением параметров парения. При транспортировке машины на других транспортных средствах боковые элементы складываются и ширина машины уменьшаться с 4,9 м до 2,95 м. Летом 1964 г. фирма провела испытания этой АМВП в Гренландии в различных грунтовых условиях. При этом мощность двигателя вентилятора была увеличена до 88 кВт, что привело к улучшению эксплуатационных качеств машины. Фирма Бертельсен разработала и испытала другую амфибию на воздушной подушке «Аркоптер» GEM-3. Собственная масса амфибии достигает 815 кг, полная масса с четырьмя пассажирами – 1130 кг. Длина амфибии – 6,1 м, ширина – 3,08 м и высота до конца лопасти воздушного винта 2,9 м. На машине установлен авиационный двигатель «Лайкоминг» мощностью 132,5 кВт, вращающий реверсивный воздушный винт диаметром 1,83 м с регулируемым углом установки лопастей. Непосредственно за винтом расположено крыло, направляющее часть воздушного потока в камеру воздушной подушки. Поэтому сила тяжести машины уравновешивается подъемной силой крыла и давлением воздуха в подушке. Движение GEM-3 по дороге происходит на четырех убирающихся колесах авиационного типа, из которых два передних – управляемые. Для торможения используется реверс винта. Для движения по воде машина оборудована поплавками водоизмещением 1590 кг, которые выходят из воды при подаче воздуха под корпус. Скорость движения по воде – более 48 км/ч. Возможны и другие варианты использования воздушной подушки для создания скоростных амфибийных машин. Так, например, фирма Белл предложила снабжать транспортеры нагнетателями воздуха и навесным гибким ограждением, закрепленным по периметру корпуса машины, для создания воздушной подушки. После выхода на берег навесное ограждение воздушной подушки сбрасывается. Видимо, работы по созданию разнообразных и более эффективных амфибийных машин для флота и армии будут продолжаться, поскольку США располагают несколькими фирмами, способными создавать аппараты на воздушной подушке. Например, на вооружении находятся более 80 десантных кораблей на воздушной подушке (LCAC), которые могут перевозить 60 т полезного груза. Корабли этого типа имеют длину 26,8 м, ширину 14,3 м, высоту 7,3 м и могут вмещать один танк «Абрамс» и четыре легкие бронированные машины. LCAC могут двигаться с максимальной скоростью около 93 км/ч. Запас хода при движении со скоростью 74 км/ч составляет около 400 км.  Амфибия "Аэролл" (справа) 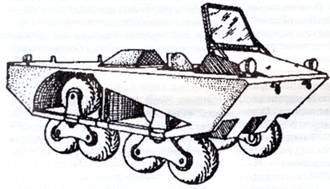 Амфибия Terra Star Амфибийные машины со специальными движителями и схемами общих компоновок Появление этих машин было вызвано желанием существенно улучшить подвижность и проходимость на любой местности, в том числе при преодолении водных преград. Это достигалось, в основном, за счет использования новых типов универсальных движителей, способных создавать силы тяги необходимой величины как при движении по суше, так и при движении по воде. К этим типам движителей следует отнести : планетарно-катковый, планетарно-колесный и роторно-винтовой. Следует также отметить, что эти движители на большинстве амфибий могут обеспечивать до 40-70 % полного объемного водоизмещения машин, что, в свою очередь, за счет уменьшения сопротивления воды вследствие небольшого погружения в воду корпусов позволяет повысить скорость движения по воде. Определенный интерес представляет планетарно-катковый движитель, являющийся комбинацией гусениц с пневмокатками. У этого движителя роль траков выполняют пневматические катки, оси которых соединены с обеих сторон с цепями, в свою очередь находящимися в зацеплении с ведущими колесами. Корпус амфибии опирается непосредственно на пневмокатки нижнего ряда. При вращении ведущих колес цепи перемещают корпус относительно катков, при этом корпус перемещается по каткам, заставляя их катиться по дороге. Скорость перемещения корпуса относительно дороги в 2 раза больше скорости перематывания цепи и скорости катков. При движении по слабым грунтам катки погружаются в грунт. Сопротивление качению катков по грунту становится очень большим, и их качение прекращается. При этом корпус перемещается вперед, скользя по каткам. При движении по воде катки не вращаются либо вращаются с небольшой угловой скоростью, создавая при перематывании цепей как плицы силу тяги движителя. Достоинство планетарно-каткового движителя заключается в его универсальности и способности обеспечить более высокую проходимость, чем гусеничный движитель, на очень слабых грунтах (болото,снег и др.) и, вместе с тем, он способен работать на дорогах с твердыми покрытиями без их разрушения. К недостаткам этого типа движителя относят: большую затрату мощности на движение по сравнению с гусеничным, меньшую эффективность на скользких твердых и неровных поверхностях, меньшие преодолеваемые подъемы, меньшую максимальную скорость движения по суше из-за отсутствия подрессоривания. Можно отметить опытную амфибию "Аэролл" с планетарно-катковым движителем. Одна из таких машин имела следующие технические характеристики: полная масса 8,63 т; габаритные размеры – длина 4420 мм, ширина – 2440 мм, высота – 2130 мм, количество катков на борт – 16; размеры катков: диаметр – 610 мм, ширина – 534 мм; удельная мощность – 6,3 кВт/т; максимальная скорость движения по воде – 16 км/ч. Другая амфибия ХМ759 с таким же типом движителя имела несколько другие технические характеристики. Ее полная масса составляла 7,72 т; габаритные размеры: длина – 6140 мм, ширина – 2800 мм, высота – 2210 мм; количество катков на борт – 17, размеры катков: диаметр – 610 мм, ширина – 534 мм; удельная мощность – 14,6 кВт/т; максимальная скорость движения по воде – 11,2 км/ч. Планетарно-колесные или колесношагающие движители обладают другими особенностями по сравнению с планетарно-катковыми. Упомянем также экспериментальную амфибию Terra Star, оборудованную планетарно-колесным движителем, который обеспечивает движение по воде со скоростью 6,5 км/ч, но позволяет надежно выходить из воды на обрывистые берега в режиме шагания. Ходовая часть этой амфибии состоит из четырех трехкатковых элементов, образующих из трех малых колес одно большое колесо, которое вращается относительно оси, жестко связанной с корпусом. Оси малых колес расположены относительно друг друга под углом 120° на радиальных полых кронштейнах, выполненных заодно со ступицей большого колеса. При движении по дорогам или любым другим твердым поверхностям большие колеса блокируются водителем, включается привод к малым колесам и амфибия движется как обычная колесная машина на четырех парах малых колес, т.е. с колесной формулой 8x8. При движении по пескам, снегу, болотам и другим слабым грунтам вращаются большие колеса, перекатываясь с одного малого колеса на другое (режим шагания). При движении по воде могут использоваться два режима работы – один по схеме колесной формулы 8x8, другой – при вращении больших колес, при котором малые колеса выполняют роль плиц гребного колеса. Но в обоих случаях не удается получить достаточные силы тяги, что ограничивает скорости движения по воде. Другим общим недостатком планетарно-колесных движителей является трудность обеспечения поворота амфибии,особенно при движении по суше. Роторно-винтовые движители успешно применяют в качестве эффективных водоходных движителей на амфибиях, предназначенных для эксплуатации преимущественно на слабых грунтах и на воде. Впервые движитель такого типа был предложен в самом начале 19 века как судовой движитель для одного их пароходов. Этот тип движителя также является универсальным и обеспечивающим достаточно большой водоизмещающий объем. Основной недостаток – невозможность движения по твердым поверхностям любого типа, включая дороги с твердыми покрытиями и без них. Амфибия фирмы Крайслер RUC была спроектирована со следующими техническими параметрами: полная масса – 6,01 т, удельная мощность 46,5 кВт/т, длина и ширина амфибии – 6147x4267 мм, диаметр ротора – 991 мм, длина ротора – 5486 мм, максимальная скорость движения по воде – 27,8 км/ч. Большая скорость движения этой амфибии по воде обусловлена высокой удельной мощностью и отсутствием контакта с водой корпуса, расположенного выше плоскости ватерлинии. При этом дорожный просвет под корпусом превышает диаметр роторов на 254 мм без учета высоты лопастей ротора, которая на этой амфибии равна 241 мм. Относительное удлинение двухзаходного ротора составляет 5,54, а шаг лопастей – около 3,9 м. Скорости движения этой амфибии по воде (27,8 км/ч), по болоту (32 км/ч) и по снегу (33 км/ч) мало отличаются друг от друга, и это не встречается среди других амфибий с иными типами универсальных движителей. Стремление еще более улучшить круглогодичную опорную и профильную проходимость машин высокой проходимости, в том числе и амфибийных, привело к созданию сочлененных машин, состоящих из двух-трех секций и оснащенных очень широкими гусеницами. Из других конструктивных особенностей сочлененных машин следует отметить две следующие: во-первых, моторная установка устанавливается на одном из звеньев, и ее мощность с помощью специального привода распределяется между всеми гусеницами звеньев, во-вторых, сцепные устройства звеньев позволяют не только передавать крутящий момент от одного звена к другому, но и поворачивать звенья с помощью гидроприводов на достаточно большие углы относительно друг друга в вертикальной и горизонтальной плоскостях. Возможность изменения взаимного положения звеньев существенно повышает профильную проходимость, а также обеспечивает изменение направления движения машин на суше и на воде.  Двухсекционный гусеничный транспортер Polecat 1 и схема его поворота    Двухсекционный плавающий сочлененный транспортер Polecat Mark 1 «Terrapin» на суше и на воде Первой из машин сочлененного типа, созданной после Второй мировой войны, была изготовленная в Канаде фирмой Canadair Limited в 1957 г. двухзвенная гусеничная машина RAT. Положительные результаты испытаний этой машины привлекли внимание к сочлененным машинам в других странах, климатические и почвенные условия которых были близки к канадским – США, Швеции и СССР. В США, кроме использования канадских сочлененных машин, например транспортера CL91 Dynatrac (в США индекс ХМ571), были сконструированы и изготовлены несколько образцов сочлененных амфибийных машин, некоторые из них были рассмотрены выше. Американская фирма Wilson Nuttall Raimond Ingineering (WNRE) в 1957 г. создала свой первый двухсекционный гусеничный транспортер Polecat 1, образованный из двух транспортеров М29 Weasel с сохранением большинства стандартных агрегатов этой машины. Двигатель был установлен в задней секции, а привод на гусеницы передней секции осуществлялся стандарными карданными передачами, которые проходили через шарнирное соединение в сцепке секций. Поворот машины производится с помощью двух гидравлических цилиндров, размещенных в горизонтальной плоскости. Испытание этой машины в различных грунтовых условиях показали, что ее технические параметры улучшены по сравнению с исходными данным транспортера М29. После некоторой доработки части агрегатов по результатам испытаний был создан новый сочлененный гусеничный транспортер Polecat М941. В 1959 г. он был принят на вооружение армии США в качестве скоростного транспортера высокой проходимости для перевозки личного состава в Гренландии, где он с успехом эксплуатировался в течение многих лет. В передней секции этой машины устанавливался 6-ти цилиндровый двигатель мощностью 89,8 кВт с пятиступенчатой синхронизированной коробкой передач и два сидения для механика и радиста. В задней секции были оборудованы сидения для перевозимых людей и места для небольших грузов. Обе секции имели кузова автобусного типа, изготовленные из алюминиевого сплава. Полная масса передней секции составляла 2995 кг, задней – 3175 кг. Опорная площадь каждой гусеницы составляет 2,05 м2 . Среднее давление на грунт передней и задней секции соответственно равно 14,42 и 15,1 кПа. Общая длина транспортера 10,3 м, ширина – 2,05 м. Максимальная скорость по суше – 32 км/ч. Минимальный радиус поворота – 5,8 м. В 1960-1961 гг. проходил испытания другой образец двухсекционного плавающего сочлененного транспортера фирмы WNRE Polecat Mark 1 «Terrapin». Карбюраторный V-образный 8-ми цилиндровый двигатель фирмы Крайслер мощностью 110,4 кВт был установлен в передней секции. С ним была соединена 5-ти ступенчатая коробка передач. Ведущие мосты автомобильного типа, применялся блокируемый межосевой дифференциал. Шарнирное соединение секций позволяет поворачивать с помощью силовых гидроцилиндров одну секцию относительно другой в горизонтальной и вертикальных плоскостях на углы 35° в обе стороны, что обеспечивает управляемость на суше и на воде,а также улучшает проходимость машины. Ходовая часть каждого борта состоит из четырех независимо подрессоренных опорных катков на пневматических шинах.  Сочленная гусеничная амфибия Cobra  Паромно-мостовая машина МАВ с верхним строением в рабочем положении Балансирные рычаги катков имеют гидравлические упругие элементы. Ширина гусеницы, изготовленной из двух резиновых лент на нейлоновой основе и имеющей поперечные грунтозацепы, составляет 890 мм. Минимальный радиус поворота на суше – 11,6 м. На воде транспортер движется со скоростью 4,8 км/ч за счет вращения гусениц. Для удаления попавшей в корпус забортной воды в обеих секциях установлены водооткачивающие насосы с электроприводом. Максимальная скорость движения по суше 56 км/ч. При необходимости передняя секция может двигаться самостоятельно. Передняя секция имела кузов с окнами, задняя – грузовую платформу размером 4,2x2,4 м. Фирма WNRE через некоторое время изготовила следующую модель двухзвенного транспортера большей массы и грузоподъемности – Polecat Mark 2 «Terrapin». Первая секция этой машины имела полную массу 5870 кг, вторая секция – 5440 кг, а транспортер в целом – 11310 кг. Грузоподъемность – 3170 кг. Экипаж – 2 человека. Мощность двигателя – 110,4 кВт. Габаритные размеры: первой секции – длина 5700 мм, ширина 2400 мм, высота 3450 мм, второй секции – длина 6000 мм, ширина 2400 мм. Длина шарнирного сцепного устройства звеньев -1500 мм. Транспортер в целом имел длину 11800 мм, ширину 2400 мм, высоту 3450 мм. Дорожный просвет – 343 мм. Ширина гусеницы составляла 890 мм. Среднее давление на грунт при полной нагрузке передней секции – 12,55 кПа, задней секции – 11,18 кПа, в среднем для машины 11,87 кПа. Максимальная скорость на суше достигала 49,5 км/ч при запасе хода 160 км. Минимальный радиус поворота на суше – 11,6 м. Максимальная скорость по воде – 4,8 км/ч. удельная мощность транспортера 9,76 кВт/т. Число Фруда 0,28. Фирма WNRE, учитывая положительный опыт эксплуатации двухсекционных сочлененных транспортеров, разработала по заказу Министерства обороны США для проведения исследований трехсекционную гусеничную сочлененную машину Cobra с шестью ведущими гусеницами. Общая длина транспортера составляла 12,8 м, при этом радиус поворота на суше не превышал 9,2 м. Для переправы через водные преграды тяжелых машин (танков, САУ и другой техники) в США были разработаны паромно-мостовые амфибийные машины, конструкция которых позволяет в зависимости от конкретных условий оперативно изменять способ переправы. В одних случаях они используются как одиночные или сборные паромы повышенной грузоподъемности, в других случаях их конструкция позволяет собирать и наводить из них наплавные мосты различной грузоподъемности и длины. Примером такой паромно-мостовой машины могут служить амфибии парка МАВ. В состав каждого парка входит несколько машин: две береговые машины, которые при использовании парка в качестве наплавного моста сопрягаются с берегами, и две линейные машины, образующие ленту моста или входящие в состав парома требуемой грузоподъемности. Каждая машина является колесной 4x4 амфибией, корпус которой изготовлен из алюминиевого сплава.Масса каждой береговой машины достигает 24600 кг, а каждой линейной – 21850 кг. Габаритные размеры: длина – 13030 мм, ширина – 3657 мм, высота – 3327- 3530 мм. Моторная установка – дизель мощностью 246,6 кВт, установленный в средней части корпуса. Водоходный движитель – гребной винт в направляющей насадке диаметром 711 мм. Максимальная тяга гребного винта составляет 22,25 кН. Винт может подниматься в транспортное положение и опускаться в рабочее с помощью гидропривода, Максимальная скорость движения по суше – 64 км/ч. Максимальная скорость движения по воде – 16,9 км/ч. Скорость движения в составе 4-х машинного парома с нагрузкой 60 т -12,9 км/ч. Следует также иметь в виду, что на суше машины не предназначены для перевозки грузов и имеют специальные верхние строения, с помощью которых образуется проезжая часть наплавного моста или парома. Естественно, что в журнальной статье невозможно привести данные и особенности конструкции всех без исключения американских амфибийных машин. Их несколько больше, чем рассмотрено выше, но многие из них являются модификациями базовых машин или отличаются от них установкой другого вооружения или оборудования.  Петр Хмелюк Александр Малышев |
|
||
|
Главная | Контакты | Нашёл ошибку | Прислать материал | Добавить в избранное |
||||
|
|
||||